- boundaryThe list of boundary IDs from the mesh where the cohesive zone will be applied
C++ Type:std::vector<BoundaryName>
Controllable:No
Description:The list of boundary IDs from the mesh where the cohesive zone will be applied
- displacementsThe nonlinear displacement variables for the problem
C++ Type:std::vector<VariableName>
Unit:(no unit assumed)
Controllable:No
Description:The nonlinear displacement variables for the problem
Cohesive Zone Action System
Action to create an instance of the cohesive zone model kernel for each displacement component
Description
The TensorMechanics system provides a cohesive zone modeling capability that can be used to introduce traction-separation models running at the interfaces between regions modeled with continuum finite elements. The implemented cohesive zone model (CZM) is based on a Discrete Galerkin approach and therefore does not require cohesive elements. The CZM is formulated in terms of traction separation laws and requires five ingredients:
BreakMeshByBlockGeneratorComputeDisplacementJumpComputeLocalTractionComputeGlobalTractionCZMInterfaceKernel
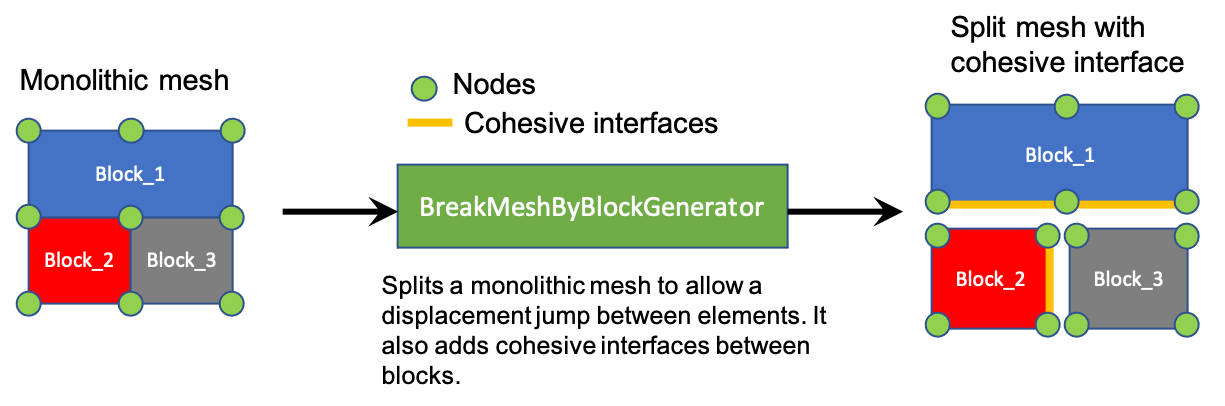
The BreakMeshByBlockGenerator is utilized to create the cohesive zone interface by splitting a monolithic mesh into blocks by adding the required nodes and boundaries between each block pair. The split mesh allows to compute a displacement jump at each quadrature point on the interface. The schematic below is an example of using BreakMeshByBlockGenerator on a 3-blocks, 2-dimensional mesh. The generated interfaces are highlighted in yellow.
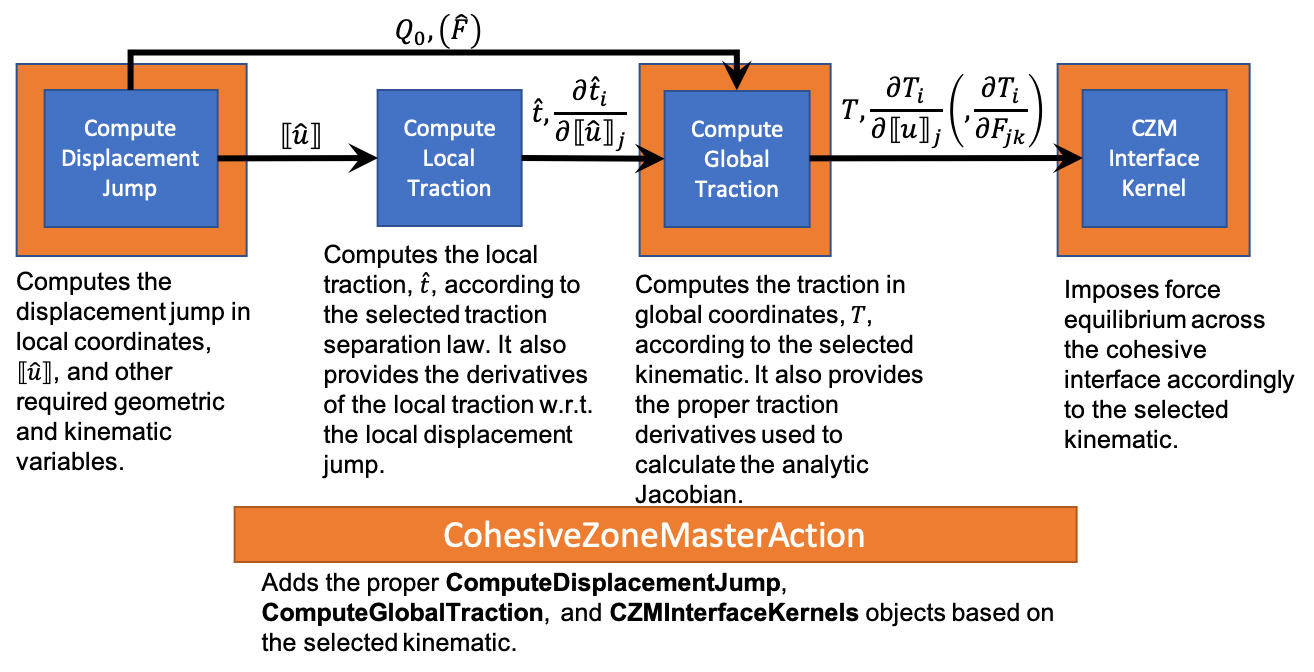
The ComputeDisplacementJump object computes the displacement jump across the cohesive zone according to the selected formulation. The ComputeLocalTraction provides the cohesive zone response in the natural interface coordinate system. The ComputeGlobalTraction object computes the traction in global coordinates and its derivative w.r.t. the displacement jump in global coordinates, . The CZMInterfaceKernel imposes equilibrium by adding the proper residual to the system, and provides the analytic Jacobian.
commentnote
The provided CZMInterfaceKernel assume the ComputeLocalTraction is only function of the displacement . If one wants to implement a traction separation law depending upon other variables, such as bulk stress or temperature, it is responsibility of the user to implement the proper Jacobian terms.
The CohesiveZone action automatically adds the proper ComputeDisplacementJump, ComputeGlobalTraction, CZMInterfaceKernel based on the kinematic_type parameter value (see inputs). The flowchart below summarizes the flow of information of the cohesive zone modeling frameworks, and highlights the objects automatically added by the CohesizeZoneMaster action.
commentnote
Even when using the CohesiveZone action it is the responsibility of the user to add the appropriate ComputeLocalTraction constitutive model and BreakMeshByBlockGenerator in the input file.
Supported Kinematic Formulations
The system supports two different kinematic formulations:
Small StrainTotal Lagrangian
Each type of formulations requires adding a different ComputeDisplacementJump, ComputeGlobalTraction, CZMInterfaceKernel.
The Small Strain formulations requires adding:
The Total Lagrangian formulations requires adding:
As mentioned in previous section, the CohesiveZone action adds the appropriate objects depending on the selected kinematic formulation.
warningwarning
To obtain a traction consistent with the bulk stress, the Small Strain kinematic should be used together with a bulk Small Strain formulation, and the Total Lagrangian kinematics should be used together with a Finite Strain formulation.
Cohesive Zone Constitutive Models
The implemented framework allows to implement two different types of cohesive zone constitutive models (e.g. traction separation laws): i) path independent, and ii) path dependent. The first type of models assumes the traction is only function of the total interface displacement jump, i.e. . This kind of models do not have history variables and can be implemented overriding the ComputeLocalTractionTotalBase class. Instead, path dependent models have history variables and assume the traction increment is a function of the interface displacement jump increment, and its old value, . Path dependent models can be implemented overriding the ComputeLocalTractionIncrementalBase class. In both cases, the traction separation law should always be formulated in terms of the local interface response and assuming Small strain. Furthermore, all constitutive laws should be implemented for the 3D general case, even if used for 1D or 2D simulations. The kinematic is already embedded in the ComputeDisplacementJump and ComputeGlobalTraction objects. Both types of ComputeLocalTraction objects allow using either the Small Strain and the Total Lagrangian kinematics.
Input Examples
The following example show how to use the CohesiveZone action.
[Physics<<<{"href": "../../../Physics/index.html"}>>>]
[SolidMechanics<<<{"href": "../../../Physics/SolidMechanics/index.html"}>>>]
[CohesiveZone<<<{"href": "../../../Physics/SolidMechanics/CohesiveZone/index.html"}>>>]
[./czm_ik]
boundary<<<{"description": "The list of boundary IDs from the mesh where the cohesive zone will be applied"}>>> = 'Block0_Block1'
strain<<<{"description": "Strain formulation"}>>> = FINITE
generate_output<<<{"description": "Add scalar quantity output for stress and/or strain"}>>> = 'traction_x traction_y traction_z jump_x jump_y jump_z normal_traction tangent_traction normal_jump tangent_jump pk1_traction_x pk1_traction_y pk1_traction_z'
[../]
[]
[]
[]If necessary, multiple instances of the CohesiveZone action can be added, for instance when different material properties base_name are needed for different boundaries. The base_name parameter used in the action should also be provided to the associated materials. The generate_output parameter adds scalar quantities of the traction and displacement jump to the outputs. Available options are: traction_x traction_y traction_z normal_traction tangent_traction jump_x jump_y jump_z normal_jump tangent_jump pk1_traction_x pk1_traction_y pk1_traction_z `.
The name `traction refers to the Cauchy traction, pk1_traction refers to the first Piola-Kirchhoff traction, and jump refers to the displacement jump across the cohesive interface. All the above vectors are defined in the global coordinate system. The normal_traction and tangent_traction are scalar values compute using CZMRealVectorScalar (the same is true for the normal_jump and tangent_jump).
[Physics<<<{"href": "../../../Physics/index.html"}>>>/SolidMechanics<<<{"href": "../../../Physics/SolidMechanics/index.html"}>>>/CohesiveZone<<<{"href": "../../../Physics/SolidMechanics/CohesiveZone/index.html"}>>>]
[./czm_ik_012]
boundary<<<{"description": "The list of boundary IDs from the mesh where the cohesive zone will be applied"}>>> = 'Block0_Block1 Block1_Block2'
base_name<<<{"description": "Material property base name"}>>> = 'czm_b012'
[../]
[./czm_ik_23]
boundary<<<{"description": "The list of boundary IDs from the mesh where the cohesive zone will be applied"}>>> = 'Block2_Block3'
base_name<<<{"description": "Material property base name"}>>> = 'czm_b23'
[../]
[]
[Materials<<<{"href": "../../../Materials/index.html"}>>>]
# cohesive materials
[./czm_3dc]
type = SalehaniIrani3DCTraction<<<{"description": "3D Coupled (3DC) cohesive law of Salehani and Irani with no damage", "href": "../../../../source/materials/cohesive_zone_model/SalehaniIrani3DCTraction.html"}>>>
boundary<<<{"description": "The list of boundaries (ids or names) from the mesh where this object applies"}>>> = 'Block0_Block1 Block1_Block2'
normal_gap_at_maximum_normal_traction<<<{"description": "The value of normal gap at which maximum normal traction is achieved"}>>> = 1
tangential_gap_at_maximum_shear_traction<<<{"description": "The value of tangential gap at which maximum shear traction is achieved"}>>> = 0.5
maximum_normal_traction<<<{"description": "The maximum normal traction the interface can sustain"}>>> = 500
maximum_shear_traction<<<{"description": "The maximum shear traction the interface can sustain"}>>> = 300
base_name<<<{"description": "Material property base name"}>>> = 'czm_b012'
[../]
[./czm_elastic_incremental]
type = PureElasticTractionSeparationIncremental
boundary = 'Block2_Block3'
normal_stiffness = 500
tangent_stiffness = 300
base_name = 'czm_b23'
[../]
# bulk materials
[./stress]
type = ADComputeFiniteStrainElasticStress<<<{"description": "Compute stress using elasticity for finite strains", "href": "../../../../source/materials/ADComputeFiniteStrainElasticStress.html"}>>>
[../]
[./elasticity_tensor]
type = ADComputeIsotropicElasticityTensor<<<{"description": "Compute a constant isotropic elasticity tensor.", "href": "../../../../source/materials/ComputeIsotropicElasticityTensor.html"}>>>
youngs_modulus<<<{"description": "Young's modulus of the material."}>>> = 200e4
poissons_ratio<<<{"description": "Poisson's ratio for the material."}>>> = 0.3
[../]
[]Input Parameters
- active__all__ If specified only the blocks named will be visited and made active
Default:__all__
C++ Type:std::vector<std::string>
Controllable:No
Description:If specified only the blocks named will be visited and made active
- base_nameMaterial property base name
C++ Type:std::string
Controllable:No
Description:Material property base name
- inactiveIf specified blocks matching these identifiers will be skipped.
C++ Type:std::vector<std::string>
Controllable:No
Description:If specified blocks matching these identifiers will be skipped.
- strainSMALLStrain formulation
Default:SMALL
C++ Type:MooseEnum
Controllable:No
Description:Strain formulation
- use_automatic_differentiationFalseWhether to use automatic differentiation to compute the Jacobian
Default:False
C++ Type:bool
Controllable:No
Description:Whether to use automatic differentiation to compute the Jacobian
- verboseFalseDisplay extra information.
Default:False
C++ Type:bool
Controllable:No
Description:Display extra information.
Optional Parameters
- additional_generate_outputAdd scalar quantity output for stress and/or strain (will be appended to the list in `generate_output`)
C++ Type:MultiMooseEnum
Controllable:No
Description:Add scalar quantity output for stress and/or strain (will be appended to the list in `generate_output`)
- additional_material_output_familySpecifies the family of FE shape functions to use for this variable.
C++ Type:MultiMooseEnum
Controllable:No
Description:Specifies the family of FE shape functions to use for this variable.
- additional_material_output_orderSpecifies the order of the FE shape function to use for this variable.
C++ Type:MultiMooseEnum
Controllable:No
Description:Specifies the order of the FE shape function to use for this variable.
- generate_outputAdd scalar quantity output for stress and/or strain
C++ Type:MultiMooseEnum
Controllable:No
Description:Add scalar quantity output for stress and/or strain
- material_output_familySpecifies the family of FE shape functions to use for this variable.
C++ Type:MultiMooseEnum
Controllable:No
Description:Specifies the family of FE shape functions to use for this variable.
- material_output_orderSpecifies the order of the FE shape function to use for this variable.
C++ Type:MultiMooseEnum
Controllable:No
Description:Specifies the order of the FE shape function to use for this variable.
Output Parameters
- control_tagsAdds user-defined labels for accessing object parameters via control logic.
C++ Type:std::vector<std::string>
Controllable:No
Description:Adds user-defined labels for accessing object parameters via control logic.
- diag_save_in_primaryThe displacement diagonal preconditioner terms on the primary side
C++ Type:std::vector<AuxVariableName>
Unit:(no unit assumed)
Controllable:No
Description:The displacement diagonal preconditioner terms on the primary side
- diag_save_in_secondaryThe displacement diagonal preconditioner terms on the secondary side
C++ Type:std::vector<AuxVariableName>
Unit:(no unit assumed)
Controllable:No
Description:The displacement diagonal preconditioner terms on the secondary side
- save_in_primaryThe displacement residuals on the primary side
C++ Type:std::vector<AuxVariableName>
Unit:(no unit assumed)
Controllable:No
Description:The displacement residuals on the primary side
- save_in_secondaryThe displacement residuals on the secondary side
C++ Type:std::vector<AuxVariableName>
Unit:(no unit assumed)
Controllable:No
Description:The displacement residuals on the secondary side
Advanced Parameters
Associated Actions
Available Actions
- Solid Mechanics App
- CommonCohesiveZoneActionStore common cohesive zone paramters
- CohesiveZoneActionAction to create an instance of the cohesive zone model kernel for each displacement component