Transfers System
When running simulations that contain MultiApps—simulations running other sub-simulations—it is often required to move data to and from the sub-applications. Transfer objects in MOOSE are designed for this purpose.
Example Transfer
Assuming that the concept of MultiApps is understood, Transfers are best understood via an example problem. First, consider a "parent" simulation that is solving the transient diffusion equation. This parent simulation also includes two "sub" applications that rely on the average value of the unknown from the parent application.
The "parent" Simulation
Listing 1 is an input file snippet showing the MultiApps block that includes a TransientMultiApp, this sub-application will execute along with the parent (at the end of each timestep) as time progresses.
Listing 1: The MultiApps block of the "parent" application that contains two sub-application that solves along with the parent as time progresses.
[MultiApps<<<{"href": "../MultiApps/index.html"}>>>]
[pp_sub]
type = TransientMultiApp<<<{"description": "MultiApp for performing coupled simulations with the parent and sub-application both progressing in time.", "href": "../../source/multiapps/TransientMultiApp.html"}>>>
app_type<<<{"description": "The type of application to build (applications not registered can be loaded with dynamic libraries. Parent application type will be used if not provided."}>>> = MooseTestApp
positions<<<{"description": "The positions of the App locations. Each set of 3 values will represent a Point. This and 'positions_file' cannot be both supplied. If this and 'positions_file'/'_objects' are not supplied, a single position (0,0,0) will be used"}>>> = '0.5 0.5 0 0.7 0.7 0'
execute_on<<<{"description": "The list of flag(s) indicating when this object should be executed. For a description of each flag, see https://mooseframework.inl.gov/source/interfaces/SetupInterface.html."}>>> = timestep_end
input_files<<<{"description": "The input file for each App. If this parameter only contains one input file it will be used for all of the Apps. When using 'positions_from_file' it is also admissable to provide one input_file per file."}>>> = sub.i
[]
[]For this example, the sub-applications require that the average from the parent in the form of a scalar AuxVariable, see the AuxVariables documentation for further information. Therefore the parent will transfer the average value (computed via the ElementAverageValue Postprocessor) to a scalar AuxVariable on each sub-application. As shown in Listing 2, the MultiAppPostprocessorToAuxScalarTransfer is provided for this purpose.
Listing 2: The Transfers block of the "parent" application that contains a Transfer of a Postprocessor to a scalar AuxVariable on sub-applications.
[Transfers<<<{"href": "index.html"}>>>]
[pp_transfer]
type = MultiAppPostprocessorToAuxScalarTransfer<<<{"description": "Transfers from a postprocessor to a scalar auxiliary variable.", "href": "../../source/transfers/MultiAppPostprocessorToAuxScalarTransfer.html"}>>>
to_multi_app<<<{"description": "The name of the MultiApp to transfer the data to"}>>> = pp_sub
from_postprocessor<<<{"description": "The name of the Postprocessor to transfer the value from."}>>> = average
to_aux_scalar<<<{"description": "The name of the scalar AuxVariable to transfer the value to."}>>> = from_parent_app
[]
[]The "sub" Simulations
For this simple example the sub-application must contain an appropriate AuxVariable to receiving the Postprocessor value from the parent application.
Listing 3: The AuxVariables block of the "sub" application that contains a scalar that the parent application will update.
[AuxVariables<<<{"href": "../AuxVariables/index.html"}>>>]
[./from_parent_app]
order<<<{"description": "Specifies the order of the FE shape function to use for this variable (additional orders not listed are allowed)"}>>> = FIRST
family<<<{"description": "Specifies the family of FE shape functions to use for this variable"}>>> = SCALAR
[../]
[]The sub-applications do not have any "knowledge" of the parent application, and simply perform calculations that utilize the scalar variable, regardless of how this scalar is computed. This approach allows the sub-application input file to run in union of independent from the parent without modification, which is useful for development and testing.
Coordinate transformations
Different applications may use different setups. For example a neutronics simulation may be performed in Cartesian 3D space whereas a fuel performance calculation may be performed using a 2D axisymmetric coordinate system. Communicating information between these different configurations can be difficult. One mechanism MOOSE provides for making this communication simpler is the MooseAppCoordTransform class. Each MooseApp instance holds a coordinate transformation object in its MooseMesh object. Users may specify transformation information about their simulation setup on a per-application basis in the input file Mesh block. The "coord_type" parameter specifies the coordinate system type, e.g. XYZ, RZ, or RSPHERICAL. Euler angles are available to describe extrinsic rotations. The convention MOOSE uses for a alpha-beta-gamma Euler angle rotation is:
Rotation about the z-axis by "alpha_rotation" degrees
Rotation about the x-axis by "beta_rotation" degrees
Rotation about the z-axis (again) by "gamma_rotation" degrees
"length_unit" allows the user to specify their mesh length unit. The code in MooseAppCoordTransform which processes this parameter leverages the MooseUnits system. A scaling transform will be constructed to convert a point in the mesh domain with the prescribed mesh length unit to the reference domain with units of meters. The last option which contributes to transformation information held by the MooseAppCoordTransform class is the "positions" parameter which is described in Positions. The value of positions exactly corresponds to the translation vector set in the MooseAppCoordTransform object of the sub-application. The alpha_rotation, beta_rotation, gamma_rotation, and positions parameters essentially describe forward transformations of the mesh domain described by the MOOSE Mesh block to a reference domain. Following the ordering here, the sequence of transformations applied in the MooseAppCoordTransform class is:
scaling
rotation
translation
coordinate collapsing
The last item in the list, coordinate collapsing, is only relevant when information has to be transferred between applications with different coordinate systems. For transferring information from XYZ to RZ, we must collapse XYZ coordinates into the RZ space since there is a unique mapping of XYZ coordinates into RZ coordinates, but not vice versa, e.g. a point in RZ has infinitely many corresponding locations in XYZ space due to rotation about the axis of symmetry. The table below summarizes the coordinate collapses that occur when transferring information between two different coordinate systems. The table should be understood as follows, using the first row as an example: for a XYZ-RZ pairing (e.g. RZ->XYZ or XYZ->RZ data transfers), both 'from' and 'to' points will be cast into the RZ coordinate system for the reasoning given above: there is a unique map from XYZ to RZ, but not vice versa. Similarly for a RZ-RSPHERICAL pairing (e.g. RZ->RSPHERICAL or RSPHERICAL->RZ data transfers), both 'from' and 'to' points will be cast into the RSPHERICAL coordinate system.
Coordinate collapsing
| Coordinate System 1 | Coordinate System 2 | Resulting Coordinate System for Data Transfer |
|---|---|---|
| XYZ | RZ | RZ |
| XYZ | RSPHERICAL | RSPHERICAL |
| RZ | RSPHERICAL | RSPHERICAL |
Note that there are consequences for these coordinate system collapses. When transferring data in the 1 -> 2 directions, there are (as already stated) infinitely many points in three-dimensional Cartesian space that correspond to a single RZ coordinate. For example, the Cartesian points (1, 0, 0) and (0, 1, 0) map to the same RZ coordinate (1, 0) if the z-axis is the axis of symmetry on the Cartesian mesh. So if we are performing a nearest-node transfer of data from XYZ to RZ, where the "to" point is (1, 0), then selection of the "from" point is arbitrary if both (1, 0, 0) and (0, 1, 0) points (or any combination of points) exist. We are considering how best to handle these situations moving forward. One option would be to average the field data from equivalent points.
For the RZ coordinate system with general axes (see Coordinate Systems), only translation is supported for coordinate transformations, i.e., there is no scaling, rotation, or coordinate collapsing.
Framework transfer classes that support the coordinate transformation processes described here are:
Examples
Let's consider an example. The below listing shows coordinate transformation given in the Mesh block of a sub-application:
[Mesh<<<{"href": "../Mesh/index.html"}>>>]
type = GeneratedMesh
dim = 2
xmin = -5
xmax = 0
ymin = 0
ymax = 10
nx = 10
ny = 20
alpha_rotation = -90
length_unit = '20*cm'
[]Here, the user is stating that a -90 degree alpha rotation (e.g. a point on the y-axis becomes a point on the x-axis) should be applied to the sub-application's domain in order to map to the reference domain (which the user has chosen to correspond to the main application domain). Additionally, the user wishes for the coordinate transformation object to know that one unit of mesh length corresponds to 20 centimeters. This information from the sub-application's Mesh block combined with the translation vector described by the positions parameter in the main application MultiApp block
[MultiApps<<<{"href": "../MultiApps/index.html"}>>>]
[sub]
type = FullSolveMultiApp<<<{"description": "Performs a complete simulation during each execution.", "href": "../../source/multiapps/FullSolveMultiApp.html"}>>>
app_type<<<{"description": "The type of application to build (applications not registered can be loaded with dynamic libraries. Parent application type will be used if not provided."}>>> = MooseTestApp
positions<<<{"description": "The positions of the App locations. Each set of 3 values will represent a Point. This and 'positions_file' cannot be both supplied. If this and 'positions_file'/'_objects' are not supplied, a single position (0,0,0) will be used"}>>> = '1 0 0'
input_files<<<{"description": "The input file for each App. If this parameter only contains one input file it will be used for all of the Apps. When using 'positions_from_file' it is also admissable to provide one input_file per file."}>>> = 'sub-app.i'
execute_on<<<{"description": "The list of flag(s) indicating when this object should be executed. For a description of each flag, see https://mooseframework.inl.gov/source/interfaces/SetupInterface.html."}>>> = 'timestep_begin'
[]
[]allows MOOSE to directly map information between the disparate application domains. The figure below shows the variable field v, which is a nonlinear variable in the sub-application and an auxiliary source variable in the main application, in both domains, indicating a successful transfer of data after applying the transformation order outlined above (rotation, scale, translation).

Figure 1: Example of rotation, scaling, and translation transformations between multiapps
Another example leveraging the MooseAppCoordTransform class is a simulation in which one application is in 3D XYZ space and another is in 2D RZ space. In this example we wish to rotate the axis of symmetry, which is the Y-axis in the 2D RZ simulation, in order to align with the z-axis when transferring data between the 2D RZ and 3D XYZ simulations. This simple rotation is achieved by specifying the beta_rotation value below
[Mesh<<<{"href": "../Mesh/index.html"}>>>]
type = GeneratedMesh
dim = 2
nx = 3
ny = 3
coord_type = RZ
beta_rotation = 90
[]We can see that the rotation transformation has been successful by examining the same field in both applications (in this case the field is solved by the nonlinear solver in the sub-application (variable u) and transferred to the main application into the auxiliary field v).
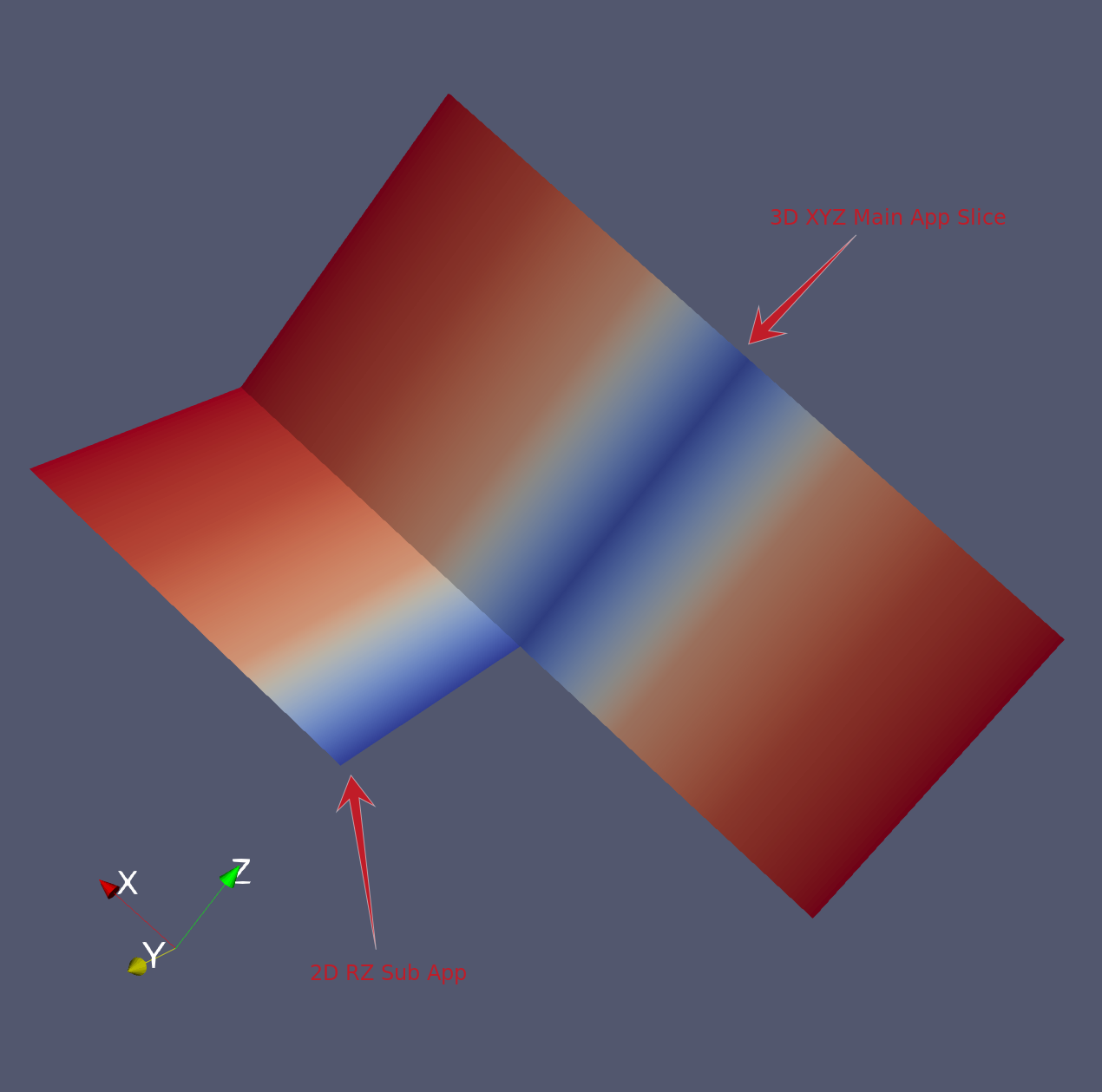
Figure 2: Example of information transformation between different coordinate system types
We mentioned how forward rotation transformations can be achieved by specifying Euler angles. Another parameter that can be used to perform rotations is "up_direction". As described in the parameter documentation string, if up_direction is specified, then in the MooseAppCoordTransform object we will prescribe a rotation matrix that corresponds to a single 90 degree rotation such that a point lying on the up_direction axis will now lie on the y-axis. We have chosen the y-axis to be the canonical reference frame up-direction because it is the literal up-direction when opening an exodus file in Paraview. Additionally it is consistent with boundary naming for cuboidal meshes generated using GeneratedMesh or GeneratedMeshGenerator in which the upper y-boundary is denoted as top.
Available Transfer Objects
The following is a complete list of the available Transfer objects, each links to a page with further details.
Available Objects
- Moose App
- MultiAppCloneReporterTransferDeclare and transfer reporter data from sub-application(s) to main application.
- MultiAppCopyTransferCopies variables (nonlinear and auxiliary) between multiapps that have identical meshes.
- MultiAppGeneralFieldNearestLocationTransferTransfers field data at the MultiApp position by finding the value at the nearest neighbor(s) in the origin application.
- MultiAppGeneralFieldNearestNodeTransferTransfers field data at the MultiApp position by finding the value at the nearest neighbor(s) in the origin application.
- MultiAppGeneralFieldShapeEvaluationTransferTransfers field data at the MultiApp position using the finite element shape functions from the origin application.
- MultiAppGeneralFieldUserObjectTransferTransfers user object spatial evaluations from an origin app onto a variable in the target application.
- MultiAppGeometricInterpolationTransferTransfers the value to the target domain from a combination/interpolation of the values on the nearest nodes in the source domain, using coefficients based on the distance to each node.
- MultiAppInterpolationTransferTransfers the value to the target domain from a combination/interpolation of the values on the nearest nodes in the source domain, using coefficients based on the distance to each node.
- MultiAppMeshFunctionTransferTransfers field data at the MultiApp position using solution the finite element function from the main/parent application, via a 'libMesh::MeshFunction' object.
- MultiAppNearestNodeTransferTransfer the value to the target domain from the nearest node in the source domain.
- MultiAppPostprocessorInterpolationTransferTransfer postprocessor data from sub-application into field data on the parent application.
- MultiAppPostprocessorToAuxScalarTransferTransfers from a postprocessor to a scalar auxiliary variable.
- MultiAppPostprocessorTransferTransfers postprocessor data between the master application and sub-application(s).
- MultiAppProjectionTransferPerform a projection between a master and sub-application mesh of a field variable.
- MultiAppReporterTransferTransfers reporter data between two applications.
- MultiAppScalarToAuxScalarTransferTransfers data from a scalar variable to an auxiliary scalar variable from different applications.
- MultiAppShapeEvaluationTransferTransfers field data at the MultiApp position using solution the finite element function from the main/parent application, via a 'libMesh::MeshFunction' object.
- MultiAppUserObjectTransferSamples a variable's value in the Parent app domain at the point where the MultiApp is and copies that value into a post-processor in the MultiApp
- MultiAppVariableValueSamplePostprocessorTransferSamples the value of a variable within the main application at each sub-application position and transfers the value to a postprocessor on the sub-application(s) when performing the to-multiapp transfer. Reconstructs the value of a CONSTANT MONOMIAL variable associating the value of each element to the value of the postprocessor in the closest sub-application whem performing the from-multiapp transfer.
- MultiAppVariableValueSampleTransferTransfers the value of a variable within the master application at each sub-application position and transfers the value to a field variable on the sub-application(s).
- MultiAppVectorPostprocessorTransferThis transfer distributes the N values of a VectorPostprocessor to Postprocessors located in N sub-apps or collects Postprocessor values from N sub-apps into a VectorPostprocessor
Available Actions
- Moose App
- AddTransferActionAdd a Transfer object to the simulation.